MIT News April 1, 2021
Using RF researchers at MIT have designed, implemented, and evaluated RF-Grasp, a robotic system that can grasp fully occluded objects in unknown and unstructured environments. It can identify and locate target objects through occlusions and perform efficient exploration and complex manipulation tasks in non-line-of-sight settings. It relies on an eye-in-hand camera and batteryless RFID tags attached to objects of interest. There are two main innovations: (1) an RF-visual servoing controller that uses the RFID’s location to selectively explore the environment and plan an efficient trajectory toward an occluded target, and (2) an RFvisual deep reinforcement learning network that can learn and execute efficient, complex policies for decluttering and grasping. In demonstrations it improved success rate and efficiency by up to 40-50% over a state-of-the-art baseline. The ability to search fully occluded objects behind obstacles, opens new possibilities for robotic manipulation. The paper will be presented at an upcoming meeting. Video …read more Open Access TECHNICAL ARTICLE
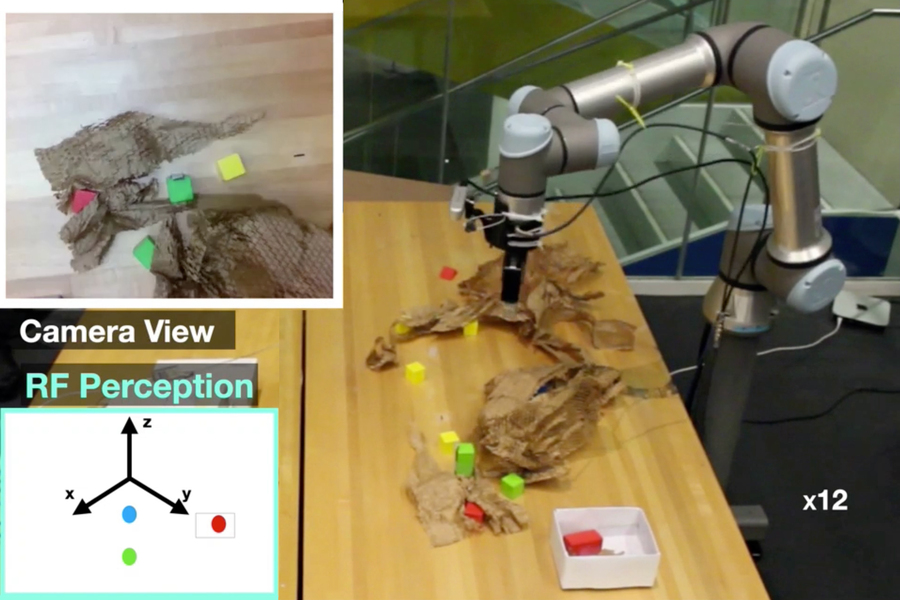
MIT researchers developed a picking robot that combines vision with RF sensing to find and grasps objects, even if they are hidden from view… Credits: Courtesy of the researchers.