TechXplore September 28, 2020
An international team of researchers (Austria, Germany) has created a soft robot and demonstrated a series of simulation-guided lightweight, durable, untethered, small-scale soft-bodied robots that perform large-degree deformations at high frequencies up to 100 Hz. They are driven at very low magnetic fields down to 0.5 mT and exhibit a specific energy density of 10.8 kJ m−3 mT−1. They observed asynchronous strongly nonlinear cross-clapping behavior of the robots in experiments and analyzed by simulation, breaking ground for future designs of soft-bodied robots. The robots walk, swim, levitate, transport cargo, squeeze into a vessel smaller than their dimensions and can momentarily close around a living fly. Such ultrafast soft robots can rapidly adapt to varying environmental conditions, inspire biomedical applications in confined environments, and serve as model systems to develop complex movements inspired by nature…read more. Open Access TECHNICAL ARTICLE
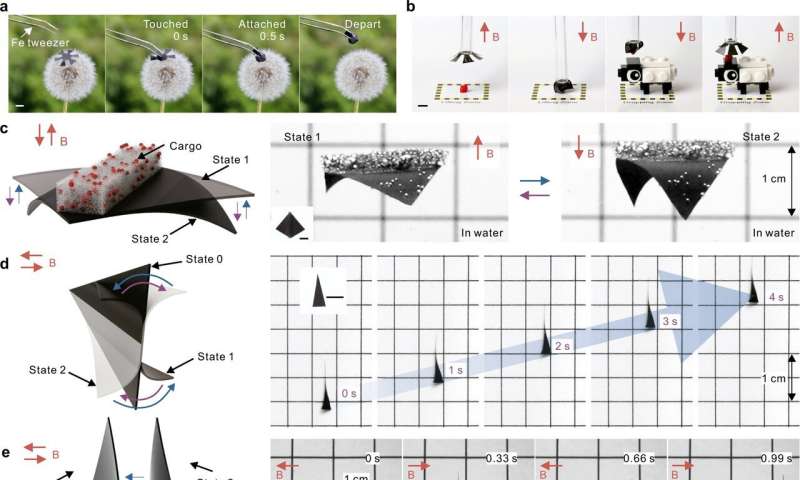
A six-arm robot on a dandelion can self-grip when approaching magnetic tweezers without harming the fragile structure of the flower…Credit: Communications Materials volume 1, Article number: 67 2020